
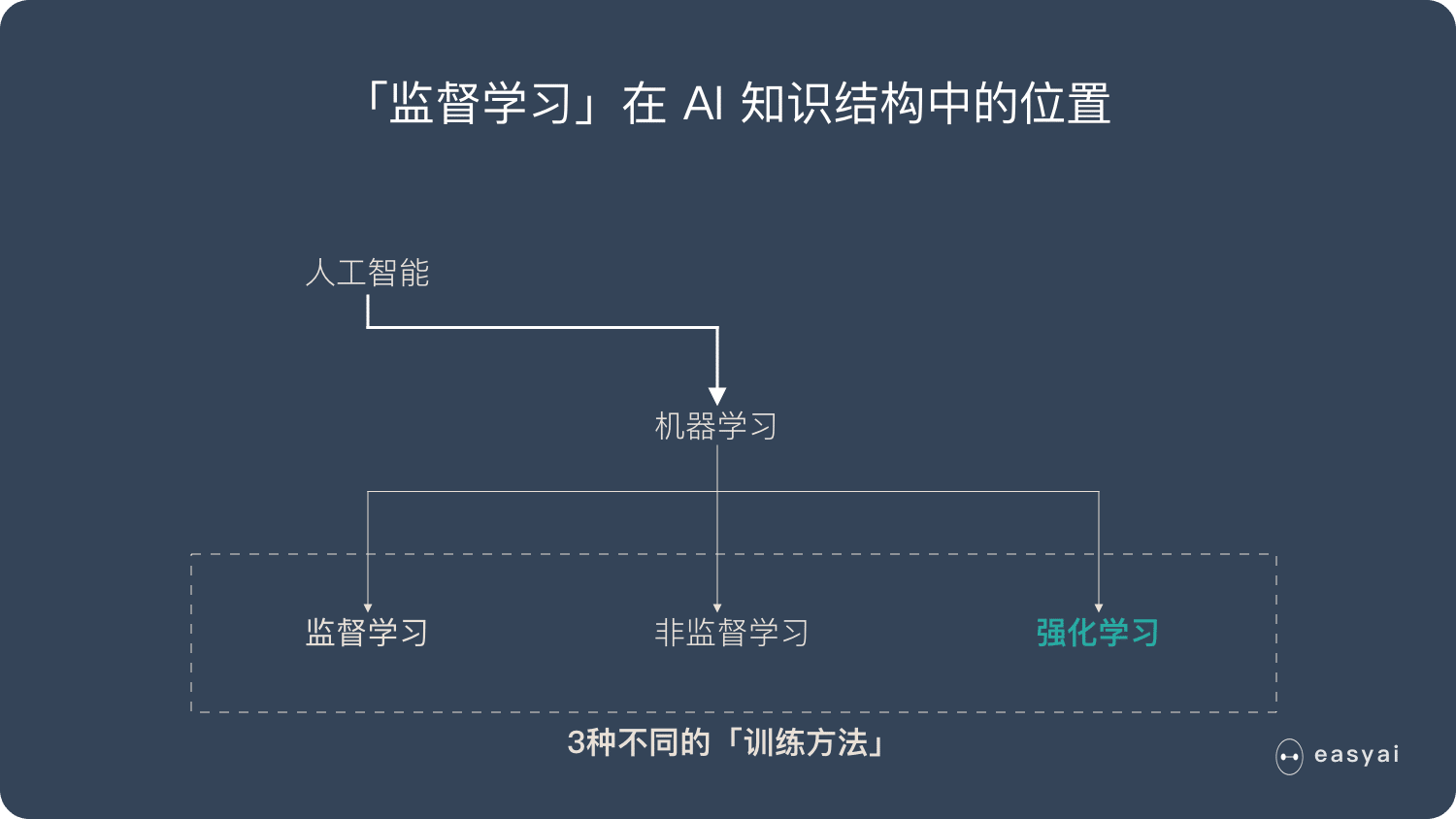
强化学习是机器学习的一种学习方式,它跟监督学习、无监督学习是对应的。本文将详细介绍强化学习的基本概念、应用场景和主流的强化学习算法及分类。
什么是强化学习?
强化学习并不是某一种特定的算法,而是一类算法的统称。
如果用来做对比的话,他跟监督学习,无监督学习 是类似的,是一种统称的学习方式。
强化学习算法的思路非常简单,以游戏为例,如果在游戏中采取某种策略可以取得较高的得分,那么就进一步「强化」这种策略,以期继续取得较好的结果。这种策略与日常生活中的各种「绩效奖励」非常类似。我们平时也常常用这样的策略来提高自己的游戏水平。
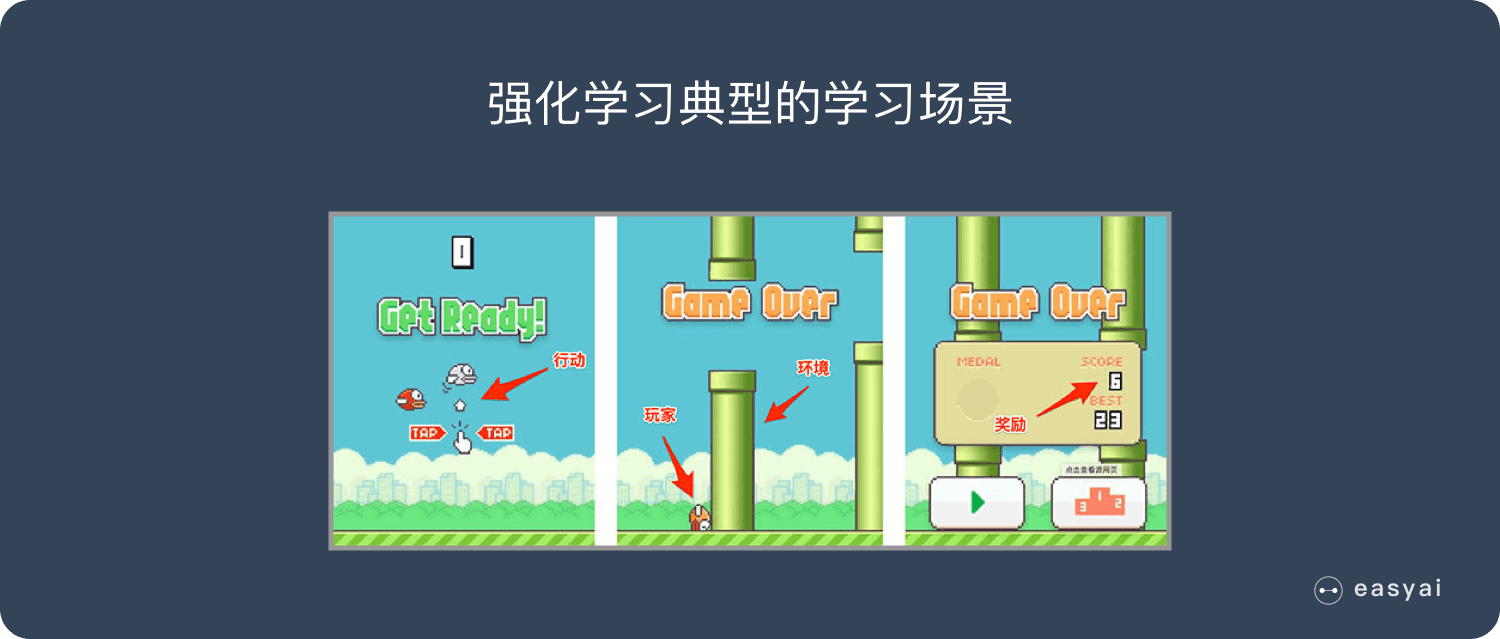
在 Flappy bird 这个游戏中,我们需要简单的点击操作来控制小鸟,躲过各种水管,飞的越远越好,因为飞的越远就能获得更高的积分奖励。
这就是一个典型的强化学习场景:
- 机器有一个明确的小鸟角色——代理
- 需要控制小鸟飞的更远——目标
- 整个游戏过程中需要躲避各种水管——环境
- 躲避水管的方法是让小鸟用力飞一下——行动
- 飞的越远,就会获得越多的积分——奖励
你会发现,强化学习和监督学习、无监督学习 最大的不同就是不需要大量的“数据喂养”。而是通过自己不停的尝试来学会某些技能。
强化学习的应用场景
强化学习目前还不够成熟,应用场景也比较局限。最大的应用场景就是游戏了。
游戏

2016年:AlphaGo Master 击败李世石,使用强化学习的 AlphaGo Zero 仅花了40天时间,就击败了自己的前辈 AlphaGo Master。
《被科学家誉为「世界壮举」的AlphaGo Zero, 对普通人意味着什么?》
2019年1月25日:AlphaStar 在《星际争霸2》中以 10:1 击败了人类顶级职业玩家。
《星际争霸2人类1:10输给AI!DeepMind “AlphaStar”进化神速》
2019年4月13日:OpenAI 在《Dota2》的比赛中战胜了人类世界冠军。
《2:0!Dota2世界冠军OG,被OpenAI按在地上摩擦》
机器人

机器人很像强化学习里的「代理」,在机器人领域,强化学习也可以发挥巨大的作用。
《伯克利强化学习新研究:机器人只用几分钟随机数据就能学会轨迹跟踪》
其他
强化学习在推荐系统,对话系统,教育培训,广告,金融等领域也有一些应用:
强化学习的主流算法
免模型学习(Model-Free) vs 有模型学习(Model-Based)
在介绍详细算法之前,我们先来了解一下强化学习算法的2大分类。这2个分类的重要差异是:智能体是否能完整了解或学习到所在环境的模型
有模型学习(Model-Based)对环境有提前的认知,可以提前考虑规划,但是缺点是如果模型跟真实世界不一致,那么在实际使用场景下会表现的不好。
免模型学习(Model-Free)放弃了模型学习,在效率上不如前者,但是这种方式更加容易实现,也容易在真实场景下调整到很好的状态。所以免模型学习方法更受欢迎,得到更加广泛的开发和测试。
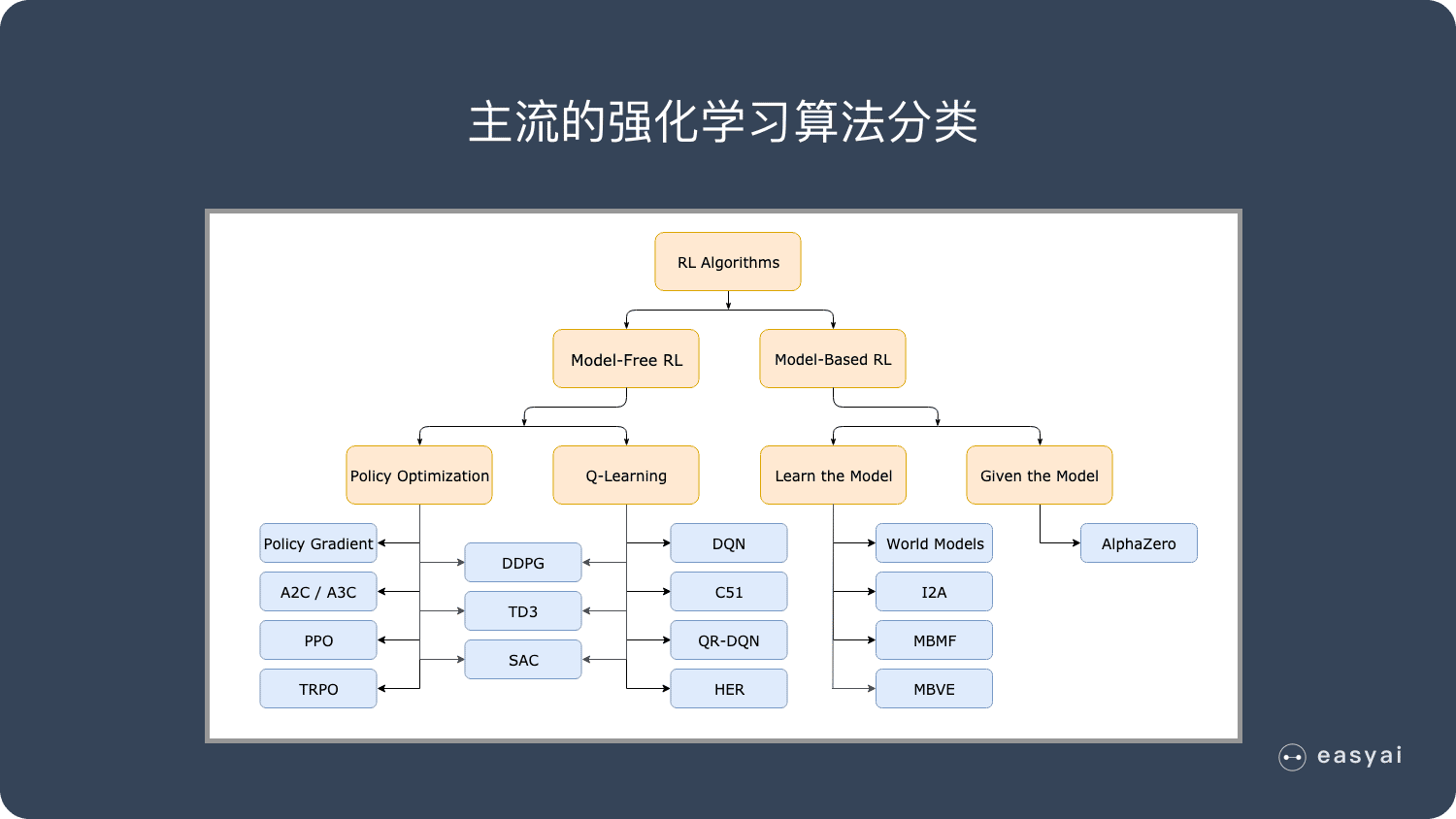
免模型学习 – 策略优化(Policy Optimization)
这个系列的方法将策略显示表示为:  。 它们直接对性能目标
。 它们直接对性能目标  进行梯度下降进行优化,或者间接地,对性能目标的局部近似函数进行优化。优化基本都是基于 同策略 的,也就是说每一步更新只会用最新的策略执行时采集到的数据。策略优化通常还包括学习出
进行梯度下降进行优化,或者间接地,对性能目标的局部近似函数进行优化。优化基本都是基于 同策略 的,也就是说每一步更新只会用最新的策略执行时采集到的数据。策略优化通常还包括学习出  ,作为
,作为  的近似,该函数用于确定如何更新策略。
的近似,该函数用于确定如何更新策略。
基于策略优化的方法举例:
免模型学习 – Q-Learning
这个系列的算法学习最优行动值函数  的近似函数:
的近似函数:  。它们通常使用基于 贝尔曼方程 的目标函数。优化过程属于 异策略 系列,这意味着每次更新可以使用任意时间点的训练数据,不管获取数据时智能体选择如何探索环境。对应的策略是通过
。它们通常使用基于 贝尔曼方程 的目标函数。优化过程属于 异策略 系列,这意味着每次更新可以使用任意时间点的训练数据,不管获取数据时智能体选择如何探索环境。对应的策略是通过  and
and  之间的联系得到的。智能体的行动由下面的式子给出:
之间的联系得到的。智能体的行动由下面的式子给出:

基于 Q-Learning 的方法
有模型学习 – 纯规划
这种最基础的方法,从来不显示的表示策略,而是纯使用规划技术来选择行动,例如 模型预测控制 (model-predictive control, MPC)。在模型预测控制中,智能体每次观察环境的时候,都会计算得到一个对于当前模型最优的规划,这里的规划指的是未来一个固定时间段内,智能体会采取的所有行动(通过学习值函数,规划算法可能会考虑到超出范围的未来奖励)。智能体先执行规划的第一个行动,然后立即舍弃规划的剩余部分。每次准备和环境进行互动时,它会计算出一个新的规划,从而避免执行小于规划范围的规划给出的行动。
- MBMF 在一些深度强化学习的标准基准任务上,基于学习到的环境模型进行模型预测控制
有模型学习 – Expert Iteration
纯规划的后来之作,使用、学习策略的显示表示形式: 。智能体在模型中应用了一种规划算法,类似蒙特卡洛树搜索(Monte Carlo Tree Search),通过对当前策略进行采样生成规划的候选行为。这种算法得到的行动比策略本身生成的要好,所以相对于策略来说,它是“专家”。随后更新策略,以产生更类似于规划算法输出的行动。
除了免模型学习和有模型学习的分类外,强化学习还有其他几种分类方式:
- 基于概率 VS 基于价值
- 回合更新 VS 单步更新
- 在线学习 VS 离线学习
详细请查看《强化学习方法汇总 》
百度百科和维基百科
强化学习(reinforcement learning),又称再励学习、评价学习,是一种重要的机器学习方法,在智能控制机器人及分析预测等领域有许多应用。
但在传统的机器学习分类中没有提到过强化学习,而在连接主义学习中,把学习算法分为三种类型,即非监督学习(unsupervised learning)、监督学习(supervised leaning)和强化学习。
强化学习(RL)是机器学习的一个领域,涉及软件代理如何在环境中采取行动以最大化一些累积奖励的概念。该问题由于其一般性,在许多其他学科中得到研究,如博弈论,控制理论,运筹学,信息论,基于仿真的优化,多智能体系统,群智能,统计和遗传算法。。在运筹学和控制文献中,强化学习被称为近似动态规划或神经动态规划。
6 Comments
有收获,非常棒的提纲式文章!
不错
很不错啊
挺好
挺好的
你们广告的数量以及排版不太合适